Matrix Operations
Theorem. If the columns of C each sum to less than 1, and the entries
in
 are non-negative, then (I
- C) is invertible, and the production vector
are non-negative, then (I
- C) is invertible, and the production vector
 has nonnegative entries and is the unique solution to
has nonnegative entries and is the unique solution to
Expanding the problem.
If the external demand is
 , the various sectors can produce
units, but this
, the various sectors can produce
units, but this
will create an intermediate demand of
 .
.
They can then produce another
 units. This leads to further intermediate
units. This leads to further intermediate
demand of
 units.
units.
They can then produce another
 units. This leads to further intermediate
units. This leads to further intermediate
demand of
 units.
units.
Adding up all of the above, in total the industries have to produce this to
satisfy
the external final demand as well as all of the internal demands that arise as a
result.

Now for a trick to see this sum in another way. Let
W = I + C + C2 + C3 + . . . + Cm
Then
and so
W - CW = (I - C)W =
If the columns of C each sum to values strictly less than 1, then
 (an
(an
n × n matrix of zeros) as
 . And by the
. And by the
Theorem, (I - C) is invertible, and so

which implies
I + C + C2 + . . . + Cm ≈ (I - C)-1
if the column sums of C are less than 1. We can make the approximation as
accurate as desired by making m sufficiently large.
In practice, this can be a useful approximation, especially if the matrix is
large
and sparse (i.e., contains many zeros) and the column sums are significantly
less than one. Even a standard linear system
 can be rewritten to use
can be rewritten to use
this trick, by letting C = I -A. Then we can write the system as
Economic meaning of entries in (I - C)-1.
Given external demand
, say we have found the solution (production vector)
 satisfying
satisfying
Now consider a new external demand
 Say we have solution
Say we have solution
 satisfying
satisfying

If we let
 then
then
because everything is linear.
Now say
 Then we have solution
Then we have solution
 But this is just
But this is just
the _______________________________of (I -C)-1 ! So if we increase external
demand from
up to
 , we need to increase production from
, we need to increase production from

to
 ,
where
,
where
 .
.
Result:The jth column of (I - C)-1 says how much extra production will
be needed from all sectors, to meet one additional unit of demand for sector j.
Because the production vector
 contains the production levels for each
sector,
contains the production levels for each
sector,
and because
 , we can go even further, and get.
, we can go even further, and get.
Result :The number in row i, column j of (I - C)-1 says how much extra
production will be required of industry i in order to meet an increase in exter-
nal demand of one unit of sector j, taking into account the new intermediate
demands which arise.
This could also be written as the partial derivative

Section 2.8 { Subspaces, Basis for Null Space and Column Space
Note. examples labeled with Arabic numbers are examples from the book, examples labeled with Roman
numerals are not.
Subspaces
Definition Given a set W of vectors (such as Rn), a subspace of W is any
subset
 satisfying three properties.
satisfying three properties.
a. The zero vector is in H
b. If
 and
and
 are in H, then
are in H, then
 . (We say H is closed under addition).
. (We say H is closed under addition).
c. If , then for all scalar constants c, the vector
, then for all scalar constants c, the vector
 . (We say H is
. (We say H is
closed under scalar multiplication). Note. this includes c = 0 and c < 0.
Example 1. span of two vectors.
Say
 , and H = Spanf
, and H = Spanf . Then H is a subspace of Rn.
. Then H is a subspace of Rn.
Check.
a.
 is in the span of
is in the span of
 and
and
 , so
, so
 .
.
b. If
 and
and
 , it means
, it means
 and
and
 for some
for some
constants r1, r2, s1, and s2. Then,

 ,
which is in H since it is a linear combination of
,
which is in H since it is a linear combination of

and
 (and therefore in the span of
and
).
(and therefore in the span of
and
).
c. If
 , it means
, it means
 for some constants r1 and r2. Then,
for some constants r1 and r2. Then,
 which is in H.
which is in H.
Example 2. Line L in R2 not through the origin.
Example III. The set
 . (Read the colon as
"such
that" or "satisfying".) Check the three properties.
. (Read the colon as
"such
that" or "satisfying".) Check the three properties.
Example IV. The set
Definition. The column space of a matrix A (written "Col A") is the set of
all linear combinations of the columns of A, i.e. the span of the columns of A.
Definition. The null space of a matrix A (written "Nul A") is the set of all
solutions to the homogeneous equation

Theorem 12: For an m × n matrix A, the set H =Nul A is a subspace of Rn.
Proof: Note. a vector is in
is in
 by definition of this H.
by definition of this H.
Definition. A basis for a subspace H is a linearly independent set in H that
spans H.
Example V: The vectors
 are a basis for Rn. In fact,
they
are a basis for Rn. In fact,
they
are called the standard basis.
Example 6: Find a basis for the null space of the matrix
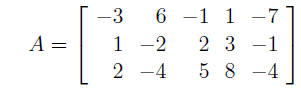
Write the solution to
 in parametric vector form.
in parametric vector form.
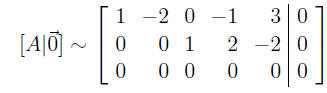
So x2, x4, and x5 are free,

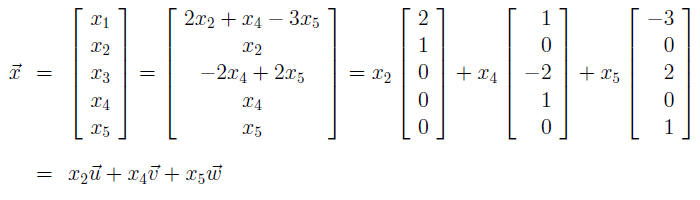
So Nul A =_____________________________
And is a linearly independent set. So in fact it is a basis for Nul
A.
is a linearly independent set. So in fact it is a basis for Nul
A.
This always happens, because.
1. When we write the solution set to
in parametric vector form, the
solution set is always the set of all linear combinations of the vectors
attached
to the free variables. That is, those vectors always span Nul A.
2. For a general matrix A and the equation
, if xi is a free variable,
think about the ith position in each of the vectors in the parametric vector
form
of the solution set to
. That position will be 1 in the vector which
goes with xi, and will be 0 in all other vectors. The same holds for the other
free variables. So the only linear combination of those vectors which gives

will be the trivial linear combination, i.e. the vectors will always be linearly
independent.
| Result 1:To find a basis for the null space of A, write the solution set to in parametric vector form. The vectors in that form are a basis. |
Finding a basis for the column space of A takes less work, but some explanation
for why the technique works.
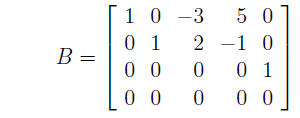
Example 7: Find a basis for the column space of the matrix
Calling the columns note that
note that

So any linear combination

can really be written as
So in fact
 spans
Col B. Also, the set
spans
Col B. Also, the set
 is linearly indepen-
is linearly indepen-
dent because those vectors are in fact the vectors
 , and
, and
 which
is
which
is
clearly a linearly independent set.
Since
 , this also means that
, this also means that
 . This in
turn
. This in
turn
implies that
Now consider the matrix
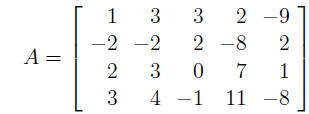
If you check, you will find that A is row equivalent to B on the previous page.
In fact, B = rref(A). The fact that A and B are row equivalent means that
This in turn means that
 where
where
 are the
columns
are the
columns
of A. So the same tricks we used with B will work for A, and in fact
spans Col A.
Also
 is a linearly independent set (you still need to give it a
little
is a linearly independent set (you still need to give it a
little
bit of thought to fill in the details to see this).
| Result 2: (Theorem 13) To find a basis for the column space of A, reduce A to an echelon form to find out where the pivots are (you don't need reduced echelon form). The pivot columns of A form a basis for the column space of A. (Warning: be sure you use the columns of the original A once you find out where the pivots are, and not the columns of the echelon form of A!!!) |

